stm32设置优先级分组抢占
#include "stm32f10x.h" static EXTI_InitTypeDef EXTI_InitStructure; static GPIO_InitTypeDef GPIO_InitStructure; static NVIC_InitTypeDef NVIC_InitStructure; #define PB5OUT(n) *(volatile uint32_t *)(0x42000000+((uint32_t)&GPIOB->ODR-0x40000000)*32+n*4) #define PE5OUT(n) *(volatile uint32_t *)(0x42000000+((uint32_t)&GPIOE->ODR-0x40000000)*32+n*4) void led0(void){ //led0-->PB5 //使能端口 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //初始化GPIO引脚 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;//高速响应 GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_SetBits(GPIOB,GPIO_Pin_5); } void led1(void){ //led1-->PE5 //使能端口 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE); //初始化GPIO引脚 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;//高速响应 GPIO_Init(GPIOE, &GPIO_InitStructure); GPIO_SetBits(GPIOE,GPIO_Pin_5); } //中断初始化函数 void exti4_init(void) { //key0-->PE4 //使能(打开)端口E的硬件时钟,就是对端口E供电 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE); //使能系统配置时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //配置引脚4的工作模式 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; GPIO_Init(GPIOE, &GPIO_InitStructure); //将引脚连接到外部中断,即将PE4和EXTI4连接在一起 GPIO_EXTILineConfig(GPIO_PortSourceGPIOE, GPIO_PinSource4); //外部中断的配置 EXTI_InitStructure.EXTI_Line = EXTI_Line4; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising ;//检测按键按下 EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能 EXTI_Init(&EXTI_InitStructure); //配置NVIC大总管允许外部中断引脚申请中断请求 NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn; //中断请求通道 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x00; //抢占优先级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //响应优先级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } void exti3_init(void) { //key1-->PE3 //使能(打开)端口E的硬件时钟,就是对端口E供电 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE); //使能系统配置时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //配置引脚3的工作模式 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; GPIO_Init(GPIOE, &GPIO_InitStructure); //将引脚连接到外部中断,即将PE3和EXTI3连接在一起 GPIO_EXTILineConfig(GPIO_PortSourceGPIOE, GPIO_PinSource3); //外部中断的配置 EXTI_InitStructure.EXTI_Line = EXTI_Line3; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising ;//检测按键按下 EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能 EXTI_Init(&EXTI_InitStructure); //配置NVIC大总管允许外部中断引脚申请中断请求 NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn; //中断请求通道 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01; //抢占优先级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; //响应优先级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } void delay(void){ uint32_t i=0x8000000; while(i--); } //中断服务函数 void EXTI4_IRQHandler(void){ //判断是否有中断请求 if(EXTI_GetITStatus(EXTI_Line4) == SET) { //灯亮 PB5OUT(5)=0; delay(); PB5OUT(5)=1; /* 清空标志位。告诉cpu,已经完成当前中断处理,可以响应新的中断请求 如果不清空标志位,会一直触发中断 */ EXTI_ClearITPendingBit(EXTI_Line4); } } void EXTI3_IRQHandler(void){ //判断是否有中断请求 if(EXTI_GetITStatus(EXTI_Line3) == SET) { //led1灯亮 PE5OUT(5)=0; delay(); PE5OUT(5)=1; /* 清空标志位。告诉cpu,已经完成当前中断处理,可以响应新的中断请求 如果不清空标志位,会一直触发中断 */ EXTI_ClearITPendingBit(EXTI_Line3); } } int main(){ led0(); led1(); //设置优先级 //中断优先级的组配置:选择第二组,支持4个抢占优先级(0~3),支持4个响应优先级(0~3), NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); exti4_init(); exti3_init(); while(1){ } }设置分组一定要在中断初始化前面,要不然实现不了中断优先级抢占,为啥呢?
下面我按照自己的理解解释下:
特别说明的一点:一般情况下,系统代码执行过程中,只设置一次中断优先级分组,比如分组2,设置好分组之后一般不会再改变分组。随意改变分组会导致中断管理混乱,程序出现意想不到的执行结果。
第二点:看这个函数的原型
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)
{
/* Check the parameters */
assert_param(IS_NVIC_PRIORITY_GROUP(NVIC_PriorityGroup));
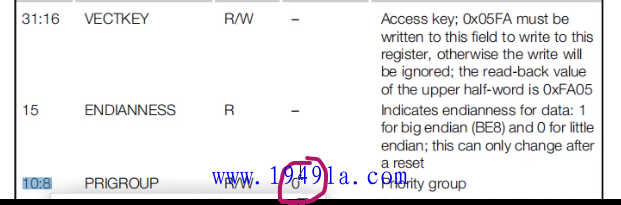
/* Set the PRIGROUP[10:8] bits according to NVIC_PriorityGroup value */
SCB->AIRCR = AIRCR_VECTKEY_MASK | NVIC_PriorityGroup;
}
可以发现它就是设置SCB->AIRCR寄存器。(参看参考手册)这个寄存器用于设置抢占优先级占几位、子优先级占几位。如果不调用这个函数的话,就是0位的抢占位(0没有优先级分组,看第二张图),也就是说没有抢占优先级。
{kind=link}
{kind=link}
所以当你先初始化中断函数之前没有设置优先级分组,他可能就默认你设置了,但是0值是没有对应的优先级分组,所以你程序的优先级就实现不了
微信扫码关注
更新实时通知